
به گزارش هلدینگ ICT – به نقل از تکاکسپلور، رباتهای سبک وزن و پرنده که به اندازه حشرات کوچک ساخته شدهاند، میتوانند کاربردهای بسیار ارزشمندی در جهان واقعی داشته باشند. به عنوان مثال، آنها میتوانند در پشتیبانی از مأموریتهای جستجو و نجات، بازرسی از مکانهای خطرناک و حتی اکتشافات فضایی نقش داشته باشند.
به رغم توانایی این رباتها، تحقق آنها تاکنون دشوار بوده است؛ به ویژه به دلیل مشکلات فنی که رباتها هنگام تلاش برای تثبیت پرواز و تکرار مصنوعی قابلیتهای ذاتی حشرات با آنها روبرو میشوند.
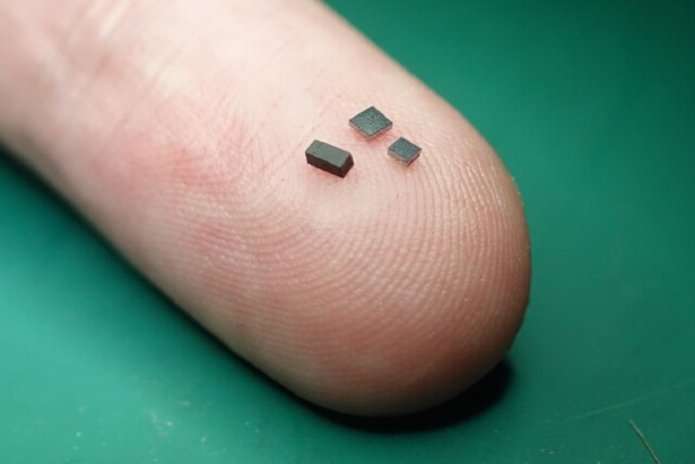
پژوهشگران «دانشگاه واشنگتن»(University of Washington) اخیرا یک سیستم کنترل پرواز و سنجش باد ابداع کردهاند که میتواند به حل کردن این مشکل چالشبرانگیز رباتیک کمک کند و نهایتا امکان پرواز پایدار رباتهایی حتی به کوچکی یک پشه را فراهم آورد. این سیستم مبتنی بر استفاده از شتابسنج است؛ حسگری که میتواند شتاب هر وسیله، جسم یا بدن متحرک را اندازهگیری کند.
«ساویر فولر»(Sawyer Fuller)، از پژوهشگران این پروژه، در مصاحبه با تکاکسپلور گفت: تقریبا ۴۰ سال است که متخصصان حوزه رباتیک و ریزساخت، رویای ساخت رباتهایی به اندازه پشه را در سر میپرورانند که تنها چند میلیگرم وزن دارند. این ایده نخستین بار توسط «آنیتا فلین»(Anita Flynn)، پژوهشگر «دانشگاه کالیفرنیا، برکلی» (UC Berkeley) پیشنهاد شد.
فولر ادامه داد: فلین و «رادنی بروکس»(Rodney Brooks) بعدها مقاله سرگرمکننده «سریع، ارزان و خارج از کنترل: حمله یک ربات به منظومه شمسی» را نوشتند که پیشنهاد فرستادن رباتهای کوچک را برای کاوش در منظومه شمسی ارائه کرد. چنین رباتهایی بسیار کوچکتر از رباتهای ۱۰۰ میلیگرمی موسوم به «روبوفلای»(Robofly) دانشگاه واشنگتن هستند که به اندازه زنبورهای گرده ساخته میشوند و دانشجویان آزمایشگاه من تاکنون تعدادی از آنها را ساختهاند.
در سالهای اخیر، بسیاری از متخصصان رباتیک در سراسر جهان تلاش کردهاند تا سیستمهای فعالسازی را برای رباتهایی به اندازه حشره با وزن ۱۰ میلیگرم یا کمتر ابداع کنند و بسیاری از آنها مانند پژوهشگران دانشگاه کالیفرنیا، برکلی و «آزمایشگاههای پژوهش ارتش آمریکا»(ARL) موفق شدند. با وجود این، تثبیت و کنترل قابل اعتماد پرواز این رباتهای فوقالعاده کوچک، تاکنون مشکلساز بوده است.
فولر توضیح داد: به عنوان یک قاعده میتوان گفت که رباتها و پهپادهای کوچک بالدار، بدون کنترل بازخورد ناپایدار هستند. یک راه حل آشکار، اضافه کردن یک ژیروسکوپ به طراحی ربات است.

اگرچه ادغام ژیروسکوپها از نظر تئوری میتواند به غلبه بر مشکلات فنی مرتبط با پرواز رباتهای پرنده کوچک کمک کند اما ژیروسکوپهای موجود به اندازهای که برای پرواز با چنین وسایل سبکی لازم است، سبک یا کارآمد نیستند. سبکترین ژیروسکوپی که تا به امروز ساخته شده، ۱۵ میلیگرم وزن دارد که پنج میلیگرم بیشتر از وزن یک ربات کامل به اندازه پشه است.
فولر گفت: راه حل پیشنهادی ما برای این مشکل، از پژوهش مقطع دکتری من سرچشمه گرفته است که من هنگام انجام دادن آن دریافتم مگسها از آنتنهای پَر شکل خود برای احساس کردن باد و کنترل پرواز استفاده میکنند. ما در این پژوهش نشان دادیم که میتوان کاری را که مگسها انجام میدهند، با استفاده از نوع دیگری از حسگرها انجام داد که همان شتابسنج است. مزیت قابل توجه روش پیشنهادشده این است که شتابسنجها ذاتا بسیار کوچکتر و کارآمدتر از ژیروسکوپ هستند. آنها در بستهبندی با وزن تنها دو میلیگرم در دسترس قرار دارند.
شتابسنجها علاوه بر این که سبکتر از ژیروسکوپها هستند، در صورت همراهی با رباتهای خوب و پویا میتوانند به تخمین زدن زاویه شیب رباتها در حین پرواز نیز کمک کنند. فولر و همکارانش در طراحی خود، از یک حسگر جریان نوری به همان اندازه سبک و یک ریزپردازنده کوچک برای تخمین زدن ارتفاع ربات و قدرت باد استفاده کردند.
فولر گفت: وقتی واکنش شبیهسازیشده سیستم خود نسبت به وزش باد را با واکنش مگس میوه نسبت به یک تندباد مقایسه کردیم، متوجه شدیم که این دو سیستم کاملا مشابه رفتار میکنند. بنابراین، اکنون ما یک فرضیه جالب در مورد کنترل پرواز حشرات داریم که باید آن را آزمایش کنیم. حشرات پرندهای مانند زنبورها و پروانهها که ژیروسکوپ ندارند، ممکن است بتوانند به واسطه سنجش باد با آنتنهای خود، پویایی پرواز خود را تثبیت کنند.
فولر و همکارانش، سیستم خود را هم در شبیهسازی و هم در آزمایشهای جهان واقعی، با استفاده از یک ربات ۳۰ گرمی آزمایش کردند و دریافتند که ربات میتواند پرواز خود را با موفقیت تثبیت کند و پویایی پرواز مگسهای میوه را داشته باشد. آنها امیدوارند که در آینده روی بسیاری از رباتهای پرنده دیگر از جمله رباتهای سبکتر با وزن ۱۰ میلیگرم یا کمتر آزمایش شود.
فولر افزود: ما توانستیم یک سیستم تثبیتکننده پرواز را با استفاده از قطعات در دسترس ابداع کنیم که به اندازه کافی برای یک ربات به اندازه پشه کوچک هستند. ما قصد داریم در پژوهشهای بعدی خود، این سیستم را در حال پرواز با روبوفلای نشان دهیم. روبوفلای این امکان را فراهم میکند تا بار مفید بیشتری به باتری بزرگتر یا حسگرهای دیگر اختصاص داده شود.